
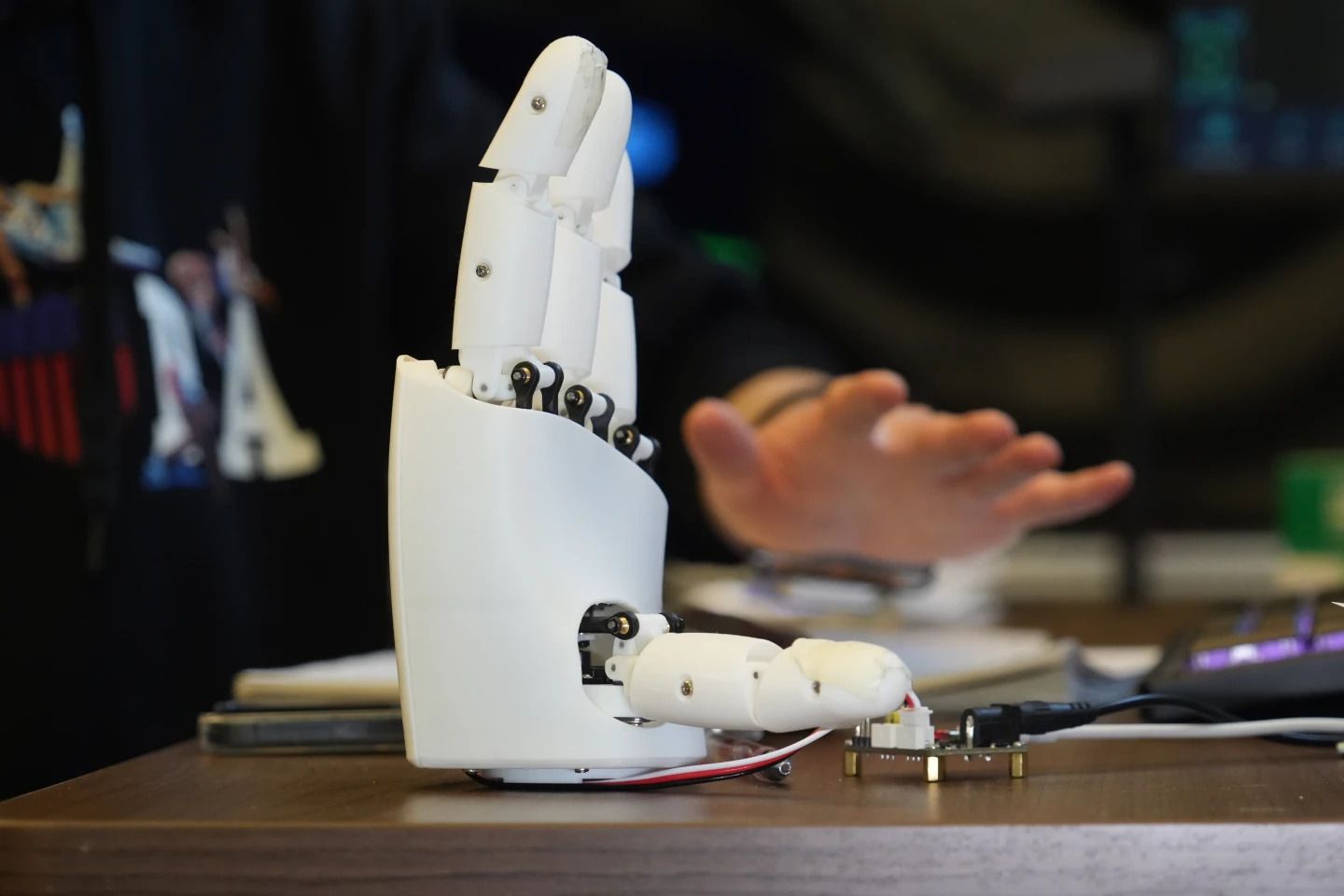
El dispositivo utiliza ultrasonido e inteligencia artificial para interpretar la actividad de músculos y tendones y reproducir gestos en tiempo real.
Un equipo de investigadores del Instituto Tecnológico de Massachusetts (MIT) desarrolló una muñequera equipada con sensores de ultrasonido e inteligencia artificial capaz de traducir los movimientos internos de la muñeca humana en órdenes precisas para controlar una mano robótica, lo que permite reproducir gestos complejos en tiempo real y busca mejorar la destreza de los robots humanoides.
El dispositivo capta la actividad de músculos, tendones y ligamentos debajo de la piel mediante ondas sonoras de alta frecuencia. Esa información es procesada por una computadora que interpreta los movimientos y los convierte en señales capaces de replicar con precisión la acción de una mano humana.
Según explicó Xuanhe Zhao, profesor de ingeniería mecánica del MIT, el objetivo es utilizar esos datos para entrenar robots capaces de realizar tareas manuales complejas. “Podemos usar los datos obtenidos por nuestro sistema para entrenar a un robot para hacer exactamente esas tareas domésticas con este movimiento manual diestro”, señaló.
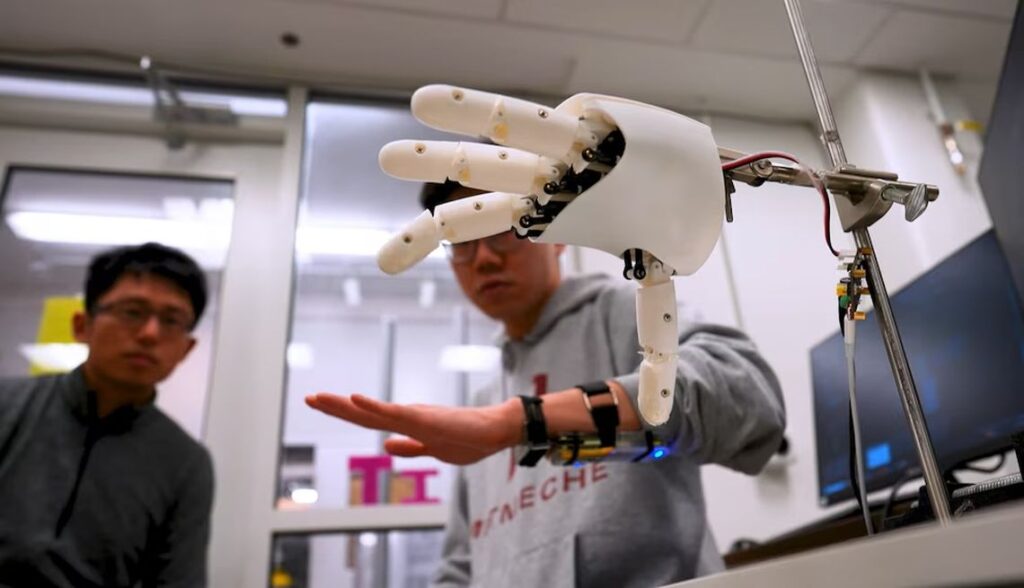
La tecnología fue probada en Cambridge, Massachusetts, con la participación de ocho voluntarios. Durante los ensayos, el sistema logró reproducir movimientos complejos de la mano, incluidas las 26 letras del lenguaje de señas estadounidense, con una demora de apenas 120 milisegundos entre la acción humana y la respuesta robótica.
El software desarrollado por el MIT traduce las imágenes obtenidas por ultrasonido en lo que los ingenieros denominan “grados de libertad”, es decir, las distintas formas en que una articulación puede doblarse o girar. La mano humana posee 22 grados de libertad, una complejidad que hasta ahora representaba uno de los principales obstáculos para la robótica humanoide.
Los investigadores destacaron además que el sistema funciona de manera inalámbrica. Esto permite que la persona que realiza los movimientos y el robot que los ejecuta se encuentren en lugares diferentes, ampliando las posibilidades de control remoto y operación a distancia.
Entre las aplicaciones previstas figuran tareas domésticas, actividades industriales y procedimientos que requieren gran precisión manual, como intervenciones quirúrgicas. La tecnología también puede utilizarse para manipular objetos en entornos virtuales y sistemas de simulación.